本为了测试惯性导航单元单元(IMU)性能,本文将进行 IMU数据分析 。两轮车上的控制器取下,直接与电机相连。命令电机分别以2Hz 、5Hz 、 7Hz频率转动,记录IMU数据(包括陀螺仪以及加速度计),测量分析传感器噪声与时延,供后面滤波时进行参考。

数据采集
采集程序的步骤是:
- 让电机低速旋转,转至加速度计测量数据为重力加速度,说明传感器已经水平。
- 清除所有积分量缓存
- 电机以给定频率和幅值的正弦信号转动,记录数据。
记录如下数据:
- 传感器读取角速度:陀螺仪测量的就是角速度,所以直接读取使用。
- 传感器读取角度:在忽略车体位移等因素的情况,整体受到的加速度仅有重力加速度,所以可以使用加速度计读数计算车体与重力方向夹角。
- 电机角速度:电机使用的是速度控制模式,即电机给定是角速度。因为电机负载较小,给定状态与实际工作状态差别很小,所以这里直接使用电机给定数据作为电机角速度。
- 电机角度:对电机角速度进行积分得到。
数据预处理
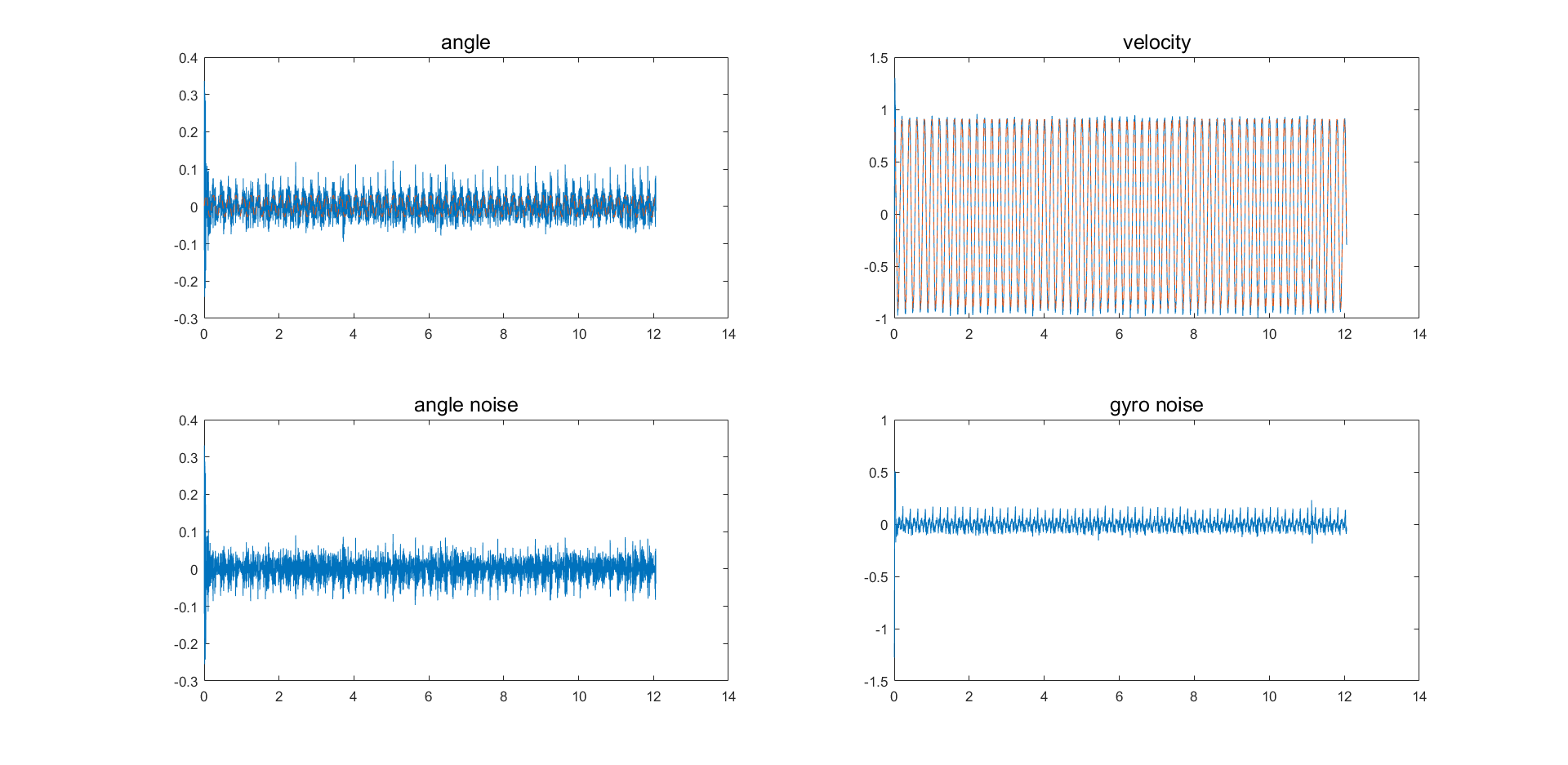
2Hz频率较低,传感器噪声表现不明显。7Hz频率较高,噪声会过大,掩饰有用信号的许多数据。所以本节选择频率折中的5Hz分析数据特点。
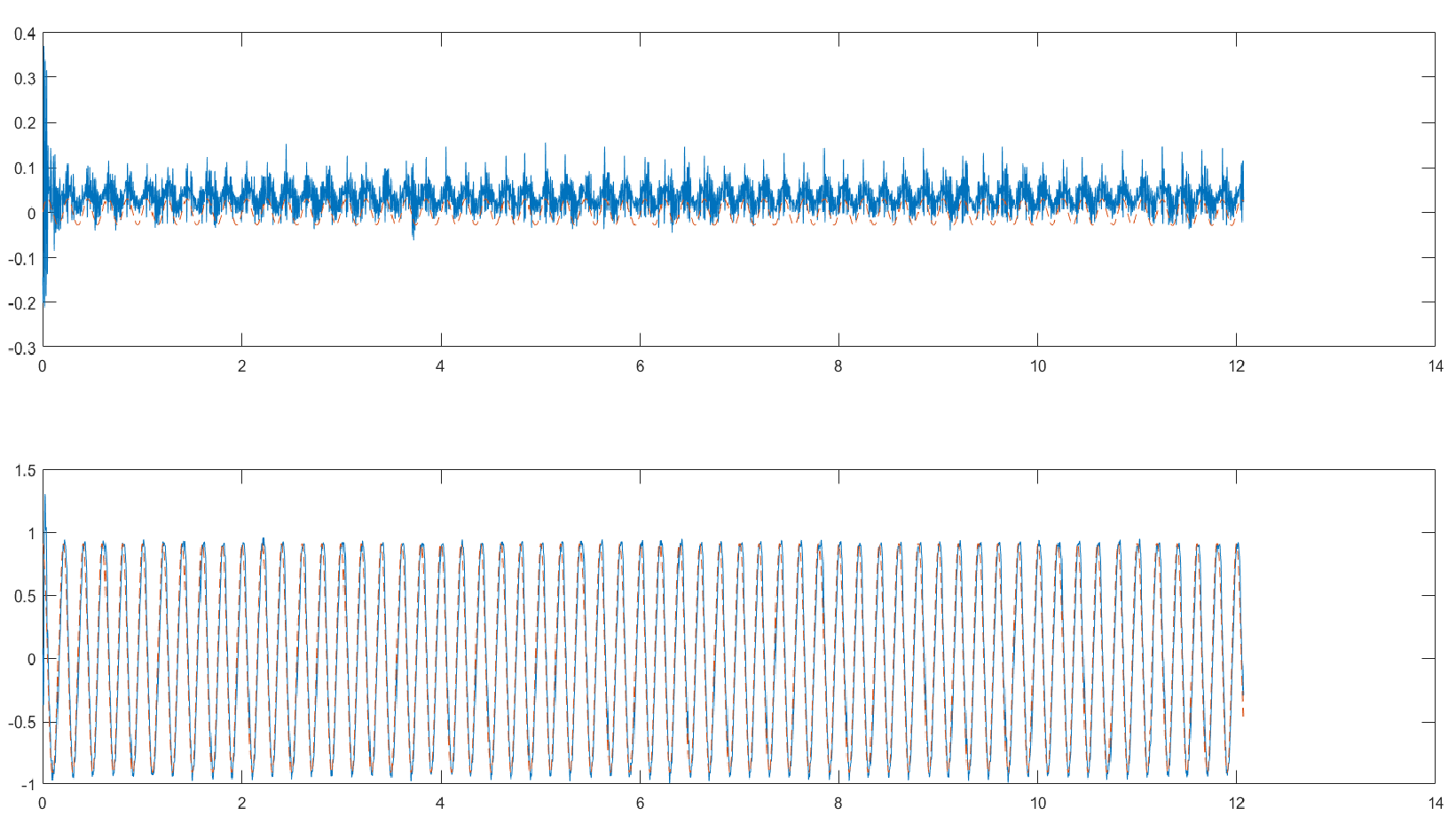
上面两幅图中上面的图是电机角度和传感器读取角度的比较,下面的图是电机角速度和电机传感器读取角速度的比较。其中蓝色实线是传感器读取数据,橙色虚线是电机给定数据。
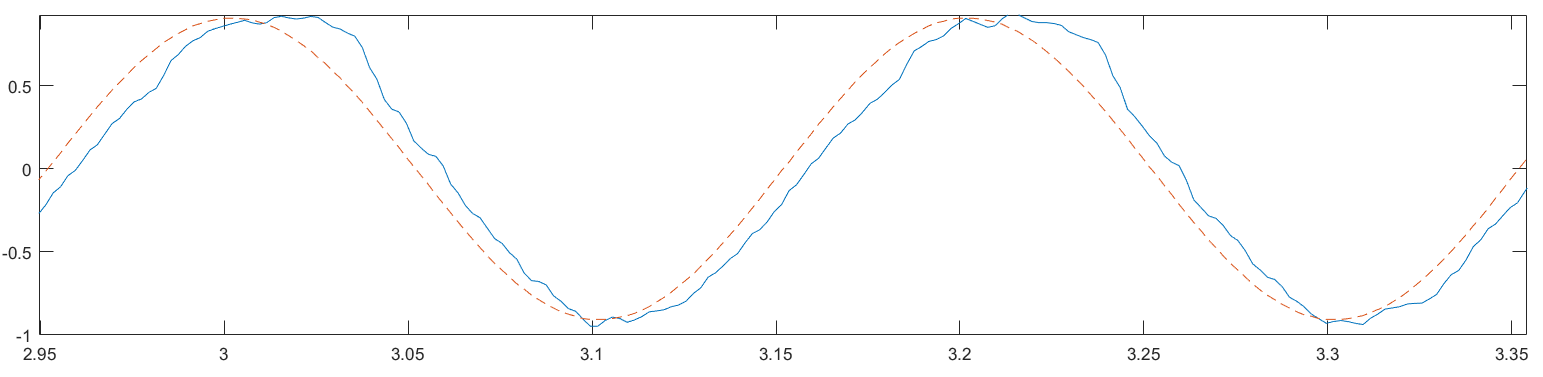
放大角速度比较数据后能明显看到一个8ms左右的时延,同时也有一个较小的静差,如下图所示。
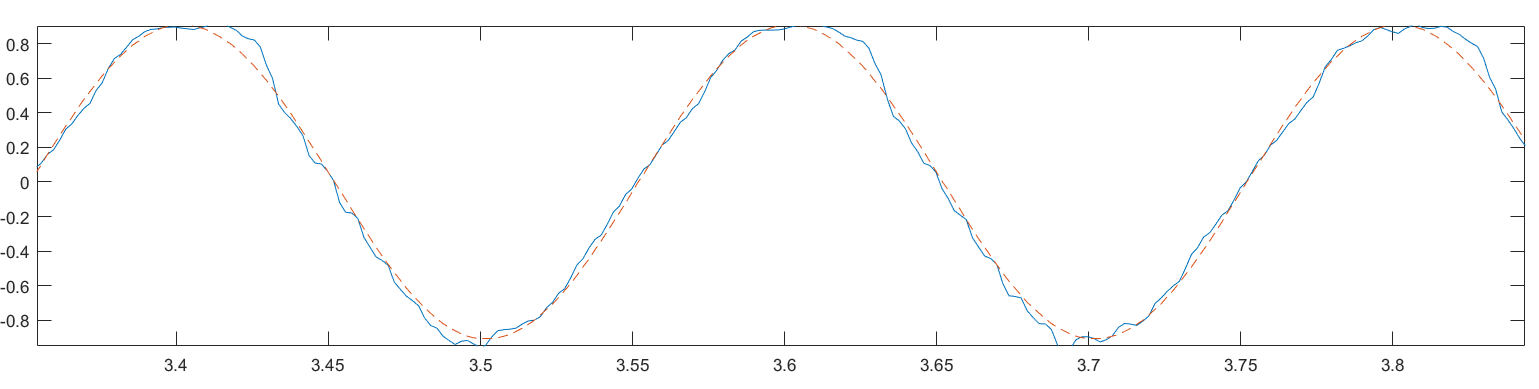
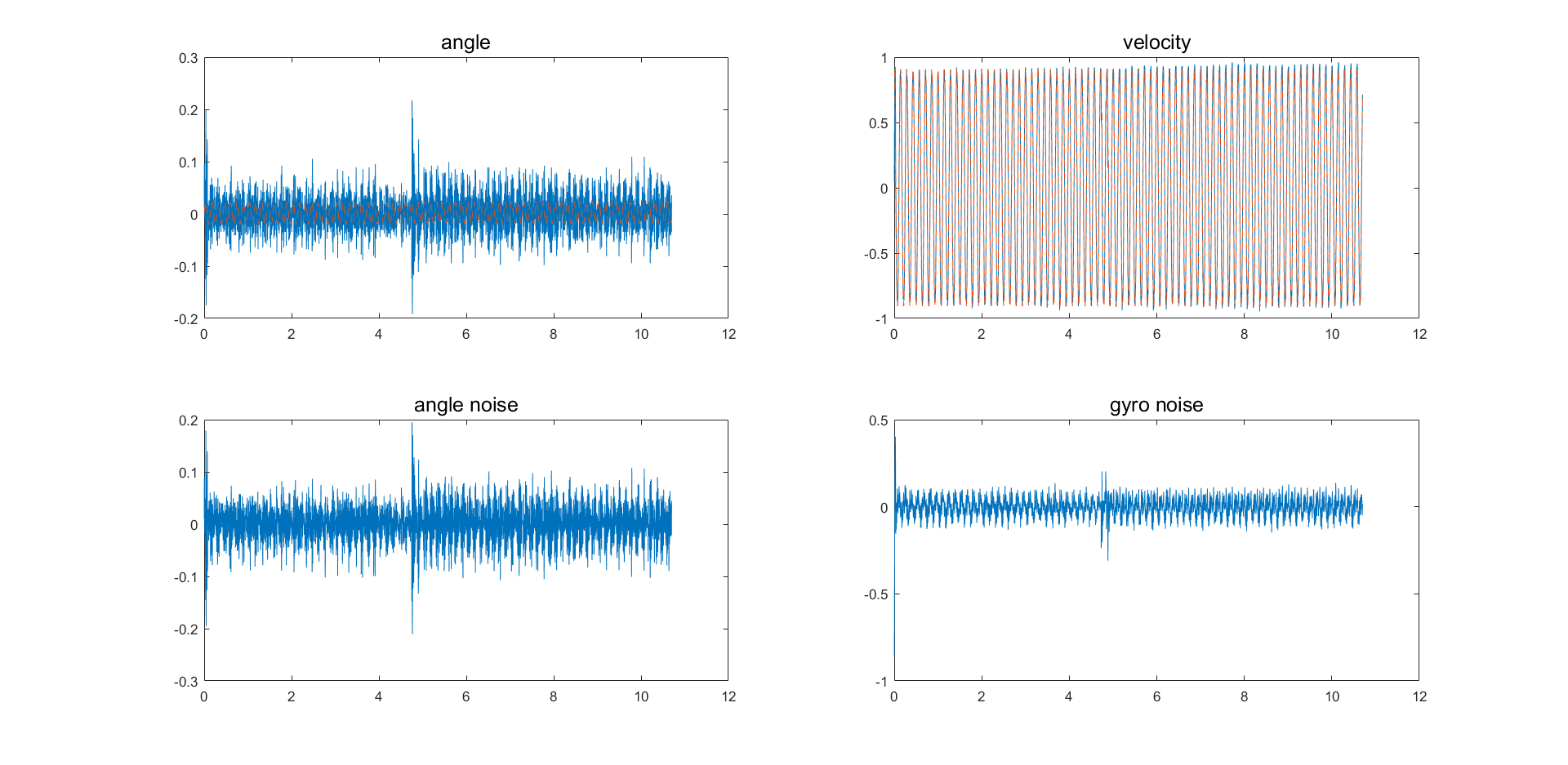
去除时延影响和静差后效果
噪声协方差计算
分别对2Hz、5Hz和7Hz信号进行预处理后对比(其中噪声为传感器测量值与电机给定之差)
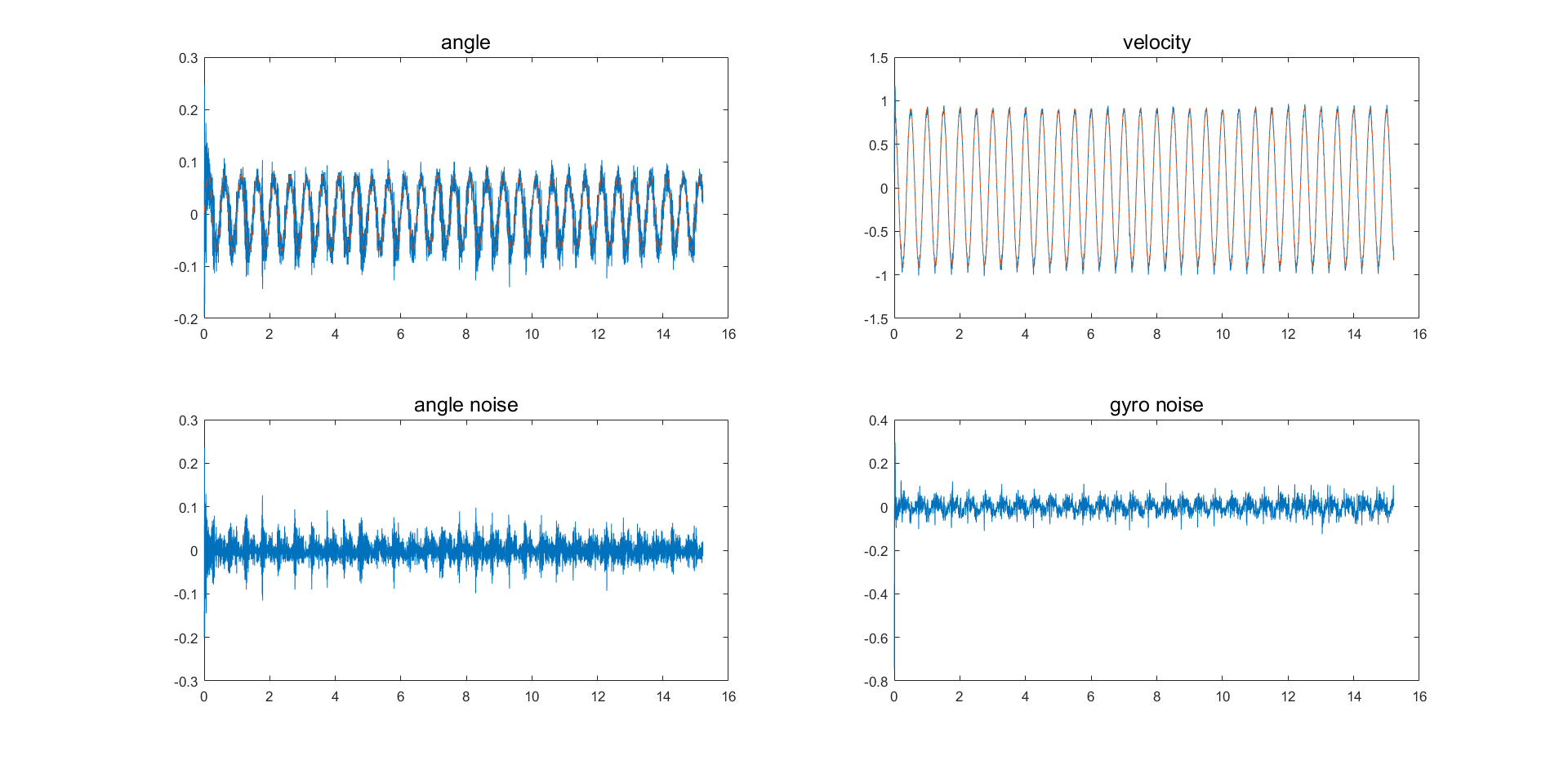
acc_noise_cov = 5.2734e-04 gyro_noise_cov = 9.8781e-04
acc_noise_cov = 8.2932e-04 gyro_noise_cov = 0.0037
acc_noise_cov = 0.0012 gyro_noise_cov = 0.0029